Робот-ассистированная (daVinci) хирургия
Клиническая практика обогатилась принципиально новым направлением, получившим название «робот-ассистированная эндовидеохирургия». С конца прошлого века в мире наблюдается активное внедрение роботизированных технологий с целью предложить преимущества минимально инвазивной хирургии для максимального числа пациентов.
История роботохирургии началась в середины 80-х годов XX века, когда группа исследователей из Стэнфордского института, Минобороны США и НАСА, занимавшаяся проблемой виртуальной реальности, заинтересовалась возможностью развития телекоммуникационной хирургии. Данные организации хотели дать возможность военным хирургам не находиться в непосредственной близости с военными действиями, а проводить операции удаленно, при помощи робота. Эта идея стала главной движущей силой в развитии хирургической робототехники. В основу была положена концепция – обеспечить хирургическую точность недоступную человеческой руке. В 1999 г. американская компания «Intuitive Surgical» представила новую роботизированную систему «da Vinci», названную – в честь великого инженера, художника и ученого Леонардо да Винчи. Хирургический робот «da Vinci» явился самой крупной технологической разработкой последних десятилетий. В 2001 году он был одобрен FDA (Управление по санитарному надзору за качеством пищевых продуктов и медикаментов) для использования в урологических операциях, в 2002 г. – для кардиотомии, в 2005 г. – для гинекологических вмешательств.
Впервые в гинекологии роботизированная система «da Vinci» (Intuitive Surgical, USA) была использована Dias-Arrastia C. et al. при выполнении гистерэктомии в 2002 г, в США. Спектр гинекологических вмешательств с использованием «da Vinci» очень широк: от органосохраняющих процедур до радикальной гистерэктомии.
В оперативном лечении каких заболеваний рационально и оправдано использование хирургического робота «da Vinci»?
1. миома матки,
- инфильтративные формы ретроцервикального эндометриоза (в т.ч., с вовлечением соседних органов),
- пролапс гениталий 3-4 ст,
- рак тела и шейки матки.
Какие операции выполняются c использованием хирургического роботизированного комплекса?
- робот-ассистированная гистерэктомия,
- робот-ассистированная миомэктомия,
- робот-ассистированное иссечение эндометриоидного инфильтрата,
- робот-ассистированная сакровагинопексия,
- робот-ассистированная пангистерэктомия с тазовой (парааортальной) лимфаденэктомией.
В настоящее время в клиниках 50 стран мира успешно используется более 3000 роботизированных хирургических комплексов (РХК). Ежедневно инсталлируются 2 новых роботизированных комплексов «da Vinci». Выполняется около 500 тыс. операций в год, из них 250 тыс – гинекологических. Каждые 1,5 минуты в мире выполняется робот-ассистированная операция. В США практически каждый госпиталь оснащен РХК.
В России до декабря 2015 года было установлено 25 роботизированных систем в 10 городах страны (Москва, Санкт-Петербург, Екатеринбург, Ханты-Mансийск, Новосибирск, Владивосток, Московская область, Ростов-на-Дону, Тюмень, Краснодар). Впервые в России операция с применением «da Vinci S» была выполнена в ГУЗ «СОКБ №1» г. Екатеринбурга в ноябре 2007 года. На сегодняшний день, лидером в области использования роботизированных технологий, в нашей стране признан ФГБУ Национальный медико-хирургический Центр (НМХЦ) им. Н.И.Пирогова, где выполнено более 1100 операций различного хирургического профиля (урологические, гинекологические, проктологические, торакальные, онкологические, сосудистые, кардиологические). Сформировано 6 бригад врачей разных специальностей, которые прошли обучение в Страсбурге (Франция), в Орландо (США). Наибольший опыт гинекологических операций также в Пироговском центре (на март 2016 года) – более 230 операций. В 2012 году Росздравнадзором была зарегистирована технология «Робот-ассистированная эндовидеохирургия», правообладателем которой является НМХЦ им. Н.И.Пирогова.
Система «da Vinci» позволяет выйти за пределы ограничений открытой хирургии и лапароскопии, расширяя визуальные и мануальные возможности хирурга, благодаря внедрения ряда инжереных инноваций:
- Уникальная 3D визуализация высокой четкости:
- первая в мире роботизированная хирургическая система с 3D изображением высокой четкости;
- вдвойне эффективное разрешение обеспечивает высокую четкость изображения тканей и органов;
- цифровое приближение уменьшает помехи между эндоскопом и инструментами;
- 0 и 30 градусные стерео эндоскопы.
- Несравненная ловкость, точность и контроль манипулирования:
- точнейший контроль пальцами рук шарнирно-сочлененных инструментов EndoWrist;
- измерение движений и уменьшение тремора;
- запатентованное Intuitive движение;
- большой спектр роботизированных манипуляторов;
- тонкий, телескопический инструмент манипулятора обеспечивает улучшенный доступ к областям оперирования и оптимальное расположение порта на теле пациента;
- широкий выбор, от 8 до 5 мм, инструментов EndoWrist.
- Лучшая эргономика оператора:
- оптимальное расположение положения рук и головы хирурга;
- обеспечивающие полный эффект присутствия стерео экраны;
- удобное положение сидя.
- Быстрая защита от неправильного обращения с системой:
- четвертый интегрированный манипулятор для немедленной работы;
- сенсорный экран для установки настроек;
- единая, высокоскоростная оптико-волоконная связь между элементами хирургической системы.
- Рациональный интерфейс Tile Pro:
- встроенный сенсорный монитор;
- телеконференция для улучшенного обучающего обзора и консультации хирургической бригады;
- мульти-портовый монитор Tile Pro позволяет наблюдать за показаниями пациента, за показаниями разных приборов системы.
Робот-ассистированные оперативные вмешательства осуществлялются в специально оснащенной операционной. РХК состоит из тележки пациента, консоли хирурга, тележки технического зрения (где расположено эндоскопическое хирургическое оборудование) (см. ниже).
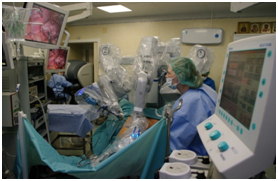

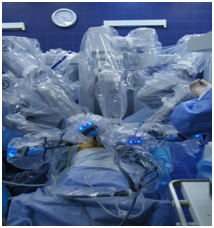
К пациентке, лежащей на операционном столе, подкатывается тележка пациента (см. ниже), четыре интерактивные руки которой фиксируются к троакарам, введеным через переднюю брюшную стенку. Через троакары в брюшную полость вводятся инструменты EndoWrist, имеющие 7 степеней свободы, предоставляющие оператору естественную ловкость при большей амплитуде движений, чем у человеческой руки. Это обеспечивает большую точность при манипулировании в минимально инвазивной среде. Хирург может самостоятельно управлять тремя инструментами и эндоскопом. Использование технологии периферийного центра (вокруг фиксированной точки в пространстве двигаются манипуляторы тележки пациента) позволяет системе маневрировать инструментами и эндоскопом в хирургическом поле, оказывая минимальное давление на переднюю брюшную стенку пациента.
В стерильной зоне справа от пациента стоит ассистент, помогающих оператору консоли хирурга осуществлять замену инструментов, аспирацию-ирригацию и т.п. Он может видеть операционное поле, используя монитор, расположенный на тележке технического зрения. Чтобы гарантировать безопасность пациента, действия ассистента имеют приоритет над действиями хирурга.

Оператор работает сидя, за консолью хирурга (см. ниже) на некотором удалении от операционного стола в нестерильной зоне. Голова его располалается у стереоскопического окуляра, руки опираются на подлокотник. Объемное трехмерное изображение с большой степенью увеличения обеспечивает беспрецедентную визуализацию анатомических структур и виртуально переносит глаза и руки хирурга в операционное поле. Кроме того, комфортная работа хирурга достигается: положением сидя, наличием подлокотников, эргономично сконструированным портом стереоскопического окуляра, обеспечивающим поддержку головы и шеи оператора, конструкцией главных контроллеров, регулировкой высоты окуляра и расстояния между глазами, позволяет минимизировать усталость и напряжение в течение операции. Это облегчает (по сравнению с лапароскопическим доступом) выполнение оперативных вмешательств, ускоряет обучение и приобретение мануальных навыков. Изменение обзора в брюшной полости, коагуляция образований осуществляется с помощью четко направленных движений рук и 4 ножных педалей.
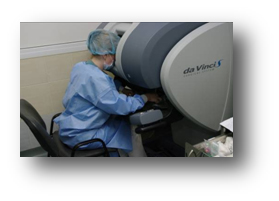

Большим и указальным пальцами рук хирург захватывает джостики (см. ниже). Движения рук оператора передаются через тележку пациента на манипуляторы. Смыкание, размыкание пальцев рук трансформируется в движения бранш инструмента. Отсутствие тактильных ощущений – непривычное для хирурга отличие роботизированной системы. Если при лапароскопии формируется опосредованная (через эндоскопический инструмент) тактильная связь, то при использовании роботизированных технологий хирург опирается только на визуальные ориентиры. Недостатки данного типа обратной связи нивелируются увеличенным трехмерным изображением высокого разрешения, особенностями роботизированных инструментов, что позволяет повысить точность диссекции и идентификации принадлежности ткани, сформировать навыки манипулирования и наложения швов после 4-5 выполненных оперативных вмешательств.
В отличии от робот-ассистированных операций, технические сложности выполнения лапароскопических операций обусловлены трудностями идентификации анатомических структур вследствии ограниченного восприятия глубины на фоне двухмерного изображения, ограниченной ловкостьи, противоинтуитивными движениями вследствие наличия эффекта опоры, необходимостью манипулировать в «узком» пространстве полости малого таза под острым углом схождения инструментов, а также эргономическими особенностями работы хирурга.
Недостатками хирургической роботизированной системы являются высокая первоначальная стоимость, ограничения, связанные с размерами и мобильностью робота, необходимость специально обученного вспомогательного персонала. Некоторые из этих ограничений преодолеваются по мере эксплуатации системы и обучения персонала.
В 2007-2008 годы были опубликованы результаты нескольких исследований по использованию «da Vinci» у большого количества пациентов с большим весом матки, продемонстрировавшие снижение времени операции и количества осложнений. Kho R.M. et al. (2007) описали ряд методик для повышения эффективности и снижения времени операции до уровня, сравнимого со временем лапароскопической гистерэктомии. Payne T.N., Dauterive F.R. (2008) опубликовали сравнительное исследование роботизированной и лапароскопической гистерэктомии при доброкачественных процессах гениталий. Это ретроспективное исследование включало по 100 пациентов с ЛГ и РГ, которые имели практически одинаковый вес матки, время операции и кровопотерю, но процент конверсий при стандартной лапароскопии был значительно выше. Кроме того, авторы отметили, что длительность последних 25 РГ значительно сократилась. Lenihan J.P. et al. (2008) анализируя частную практику двух хирургов, пришел к выводу, что после 50 гистерэктомии время выполнения операции достигает стабильной отметки в 95 мин, в независимости от веса матки.
По данным более поздних исследований, cравнение в плане клинических результатов лапароскопической и роботизированной гистерэктомии продемонстрировало малое и одинаковое количество осложнений (менее 1%) при использовании обоих методов. Временные затраты также малоразличимы, составили соответственно 2,82 и 3,22 часа. Использование роботизированного комплекса облегчает выполнение операции у больных с ИМТ≥30.
Наш опыт демонстрирует, что наиболее эффективно использование робота при работе в труднодоступных анатомических областях, в случаях необходимости выполнения обширной прецизионной диссекции тканей. Учитывая преимущества и недостатки роботизированного комплекс «da Vinci», мы считаем, наиболее целесообразное внедрение его в онкогинекологическую практику, в хирургическое лечение тяжелых форм эндометриоза, пролапса гениталий.
В целом, по мнению многих исследователей, использование робототехнологии позволяет повысить качество и эффективность лечения, снизить число осложнений, сократить сроки пребывания пациентов в стационаре и длительность периода реабилитации, снизить число абдоминальных вмешательств. На первый взгляд роботизированная операция - очень дорогостоящий метод лечения. Однако по данным более подробного анализа всех экономических аспектов с учетом меньшей длительности пребывания больных в стационаре и более быстрого возвращения к труду, он сравним с другими лечебными методами. По данным Payne T.N., Dauterive F.R. (2008), финансовые преимущества внедрения роботизированных технологий в масштабах страны связаны с практически полным отказом от абдоминального метода, уменьшением больничных осложнений и значительным снижением периода реабилитации.
Не вызывает сомнения, что широкое применение роботизированной техники в гинекологии представляется крайне перспективным направлением, отражающим интересы пациентов и требующим дальнейшего изучения и широкого внедрения в повседневную практику.